
Aimed at professional loudspeaker designers and driver engineers.
Should we care about inductance in loudspeaker drivers?
Over the years, the inductance, Le, of a speaker driver has altered between being considered important, and being a parameter we ignore completely. It does, off course, depend on who you ask. The short version of this is that inductance, despite some claims, hardly affects the frequency response. So can we then ignore it? We can, but we should definitely pay attention to it. It is a hidden treasure of complex distortion and broken transients.

Some history
Back in the days, before Thiele and Small became the gold standard in determining the properties of a loudspeaker driver, we were probably a bit more interested in the inductance; the Le parameter. It was common to make large full range drivers at the time and while the pass band frequency response is not that much affected, Le does affect the high frequency response somewhat. As the years went by and multi way systems started to dominate the market more and more, the wide band properties of drivers became less important. Thiele and Small’s set of parameters became the standard that everyone used to determine what one could expect from a driver. They allowed us to calculate cabinets, expected output, impulse response etc of the driver.
Over the years, many papers have been written on current drive amplifiers and how they affect the motor of a loudspeaker. Instead of voltage being converted to current in the motor of the loudspeaker, the amplifier directly controls the current that goes into the loudspeaker. In a driver, current is mathematically proportional to the force of the motor. A current drive amplifier has some clear advantages. At least in theory, it will then jump past the inductance and instead directly drive the force factor. However, this is not entirely true, as the force factor may not be an static parameter. Current drive amplifiers also comes with many problems that will not be covered by this article.
Many of the same problems are addressed with motors without steel parts. Some manufacturers have made drivers with the magnets directly surrounding the voice coil. Some with axial magnets, while others with radial magnets. Both alternatives pose some challenges and some advantages that will not be covered in detail in this article. Inductance is the topic, and while a permanent magnet has a relatively high permeability, a magnetized permanent magnet has very low permeability. This means that while pure magnet motors may not be perfect, they are not typically affected by the issues covered by this article.
There are two opposing trends right now. One is that there are more and more low inductance drivers in the hifi driver market. By low inductance, we basically look at <0,5mH for a woofer. In the pro industry we have a different trend. Many >2mH woofers are popping up, and some even above 10mH. This means the impedance of the driver might reach as high as 1kohm within the audio range.
The clues of inductance
While being a parameter that does not directly affect the fundamental parameters of the driver, the Le parameter can give us some very important clues to what the driver does when a signal is applied.
One important factor that one always have to remember is that for electrical considerations inductance as fraction of the impedance is the interesting part. If the driver is crossed over at 200Hz, the resistance is 7 ohms, and the total impedance at 200Hz is 7,2 ohms, it means inductance actually only accounts for 0,2 ohms or 2,8% of the impedance at this frequency. In an example driver I found, Re is 3,8 ohms, while at 200Hz the impedance is 16 ohms, or 76% of the total impedance at this frequecy. This means that if inductance is varying by 50% in the working range, the impedance of the high inductance driver will change dramatically as it moves, while at the low inductance driver it is a very minor issue. These parameters are obtained from real world drivers.
Also remember that for a 4ohm driver an inductance of 1mH is equal to 2mH for an 8 ohm driver. This is because it is the relative part of the impedance that is the interesting bit. For the same voltage in an 8 ohm driver the current is just half of what it is in a 4 ohm driver.
Inductance can be a measure of how well a driver is made. You can not compare inductance one to one, but viewed together with other parameters there are some clues to look for. Here are 5 clues I find rather intriguing:
1: Le(x)
This is the relationship between the motion of the voice coil and the inductance. When inductance varies, so will current, and then also the force factor. For a speaker with passive crossover inductance will cause transient dependent modulation. The crossover is weighted against the total impedance, so if the inductance is low to begin with this will not be a very critical factor.
2: Current dependency
A driver with very high inductance does show the reluctance of the soft magnetic parts (AKA steel parts for most drivers). When the soft magnetic parts gets saturated the reluctance drops right down. A driver with lots of un saturated steel and a large voice coil will typically show very high inductance. This can tell us where on the B-H curve (the relationship between the applied magnetic field and the magnetic flux density of a material) the inner parts of the driver might be. We have something called a knee on the B-H curve. Typically everything above the knee means saturated, while everything below the knee means non saturated.

This image shows the B-H curve for low carbon 1010 steel. The Y axis shows the flux density of the material, while the X axis shows the applied field. When the flux density is below 1,5T a minor change in the applied field will cause a huge change in flux density. When the flux is above 2,1T even a large change in the applied field will only cause a minor change in the flux density. If a motor is designed so that the parts close to the voice coil are above the point of saturation (typically around 1,9T) will have a far more stable permanent magnetic field than drivers where those parts are not saturated.
But be aware, there are numerous examples of motors with saturation not correctly located in the motor, for example at the bottom of the pole piece. This will not only have no significant effect on the stability of the motor or the reluctance, but it also prevents the magnet from performing at its full potential.
When an external field (from the voice coil) is applied, the fixed field will be affected. In a motor with no saturated parts the effect of this will be significant. For example, if the force factor at 1A is 10N/A, and we double the current to 2A, we expect the force to go to 20N. But if it only goes to 19,5A there will be some distortion added as the acceleration does not follow the input current.
So high inductance may also mean that the driver does not handle high current transients as well as a low inductance driver.
3: Frequency dependency
Here is a typical model for complex impedance of a driver. As can be seen, there are actually 4 individual factors (at least) that will affect the inductance of a driver.
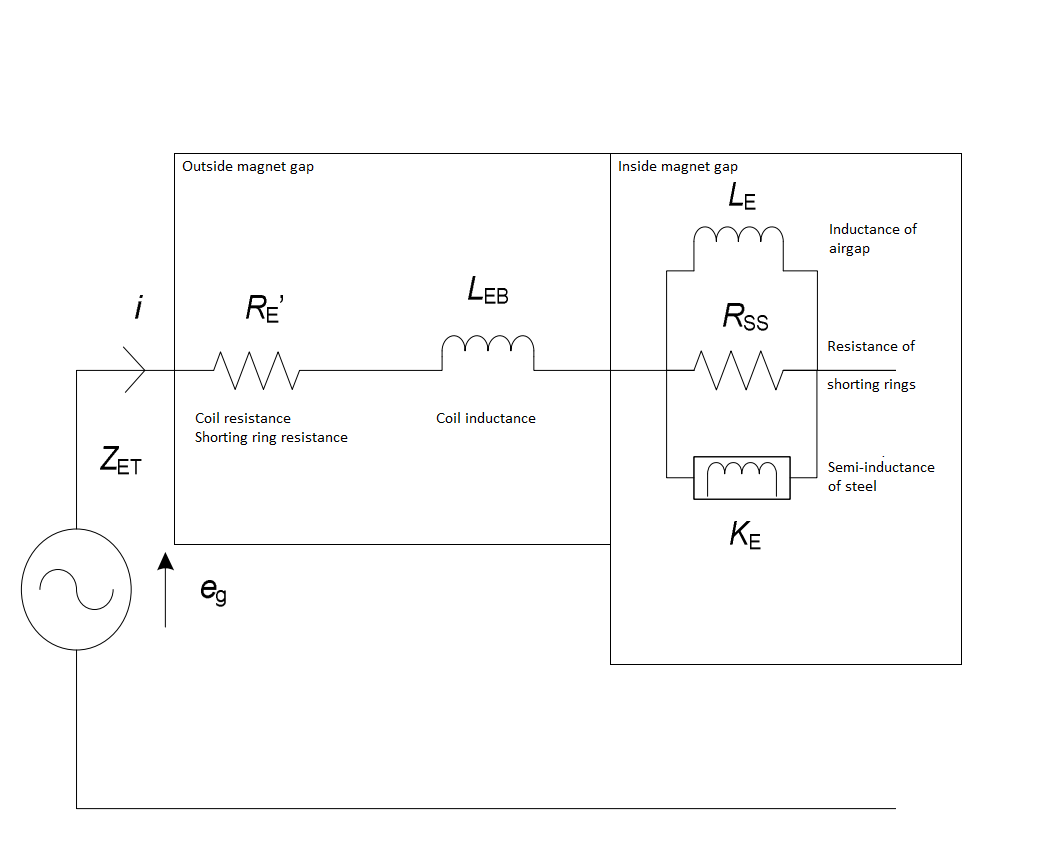
If Rss is low it means we have low impedance shorting rings. The effect of shorting rings are comparable to a transformer with its secondary winding shorted. The signal will not easily penetrate the shorting rings and get into the steel, but as for the transformer, they have no effect at DC. At low frequencies the effect will not be as good as at higher frequencies. At what frequencies a shorting ring is effective depends on its design, and we have to look at each individual case to determine what is what. The shorting rings are resistive, as shown in the diagram, but we also know they form a low pass filter in the magnetic circuit so they are in fact reactive by nature.
Something we see very often today, when shorting rings has become increasingly popular, we often see drivers where the impedance starts to rise above the Fs-peak, but flattens slightly further up the frequency scale du to their reactive nature. This is a typical clue that if you remove the shorting rings, this will probably be a very high inductance driver. Such a driver will not be much better at handling transients than it would have been without the shorting rings.
The problem is that this is not easy to determine by looking at the inductance number given for this particular driver. But there are two things one can look for in an instance like this. First, you should look at the impedance curve. If it has a V shaped dip above Fs it is probably not a great driver. If it looks like it is heading for 4 times the Re or more at 500Hz before flattening a bit, it is probably not a great driver. Also, if the Z-min (the minimum impedance above Fs) is more than 50% higher than Re, it does not matter how low the manufacturer claims the inductance to be, this probably means Ke is at extreme levels and audible distortion will be very high. In a good driver, Z-min may approach Re at 200Hz, and even up towards 1kHz.
You can also look at how the driver is built. Does it have a 4 layer 4 ohm coil? Is it likely to be saturated? I know, this is not the easiest considerations to make, but some experience might help you. Most of the time, drivers with 4 layer coils are made this way because it is cheaper than using a larger motor and stronger/heavier cone instead, and it does come with a price. But then again, some excellent drivers also have 4 layer coils so one should be a bit careful on this one.
4: The sum of magnetic fields
The force of a motor comes from the product of two magnetic force fields. The coil is one of them, while the permanent field in the magnet gap is the other one. However, the permanent magnetic field in the magnet gap is also a sum of two fields. Again, the magnetic field of the coil, while the other one is the field of the permanent magnet pushing through the soft magnetic parts. Applying a strong field from the coil will then form a strong force between the coil and the permanent field, but also modulate the permanent field causing distortion.
To generate a certain force one can use a strong permanent magnet and a weak field from the coil, or one can use a weak permanent magnet and a strong field from the coil. The strong field from the coil will obviously cause the weak permanent field to give in to the superior force of the coil, while in the case of a very weak field from the coil combined with a very strong permanent magnet, the superior permanent magnet will not be affected by the weak field from the coil.
A good old “Look at this big magnet” does make a bit of sense here. But to make a strong magnetic field from a coil, you will need lots of coil windings. A big heavy coil with many layers is what you should look out for, especially when combined with high moving mass.
5: DC factor
If you demagnetize the permanent magnet ring of a driver and apply current, it will, in most cases, move inwards regardless of the polarity of the current applied. This is due to the reluctance of the steel parts. This reluctance does depend on the permanent magnet too, but we never see a traditional motor that has no reluctance. Therefore, the soft magnetic parts of a motor will have some form of DC magnetic factor. This will also be a part of how the driver is working. While most drivers have an asymmetric DC factor, meaning the DC factor will attract the driver in one direction as current increases, it is also possible to balance it out.
But again, inductance does give us a clue to how serious this factor might be. A driver with very high inductance means there is a very strong connection between the current and the reluctance of the soft magnetic parts. Even a tiny asymmetry of the DC magnetic attraction will make it seriously move out of its ideal resting position reducing its linear excursion to almost nothing. Very high inductance is also often a clue to a driver not being perfected, and then we can not expect this symmetry to be perfected either. Instead it is probably a clue that the engineer designing this driver in the first place is actually not aware of the issues that comes with inductance.
So should we care about the inductance?
Off course, and we should use it as a one of the guidelines when selecting drivers. But be aware, drivers with great data on paper may be enforced with heavy shorting rings trying to mask a serious problem. One example was a 15 inch driver stated by the manufacturer to be 0,6mH, but a third party measurement showed that it was 1,8mH measured at the same frequency. So in some cases a low inductance number may not mean more than a car salesman saying “this car is as quick as lightning!”.
If the manufacturer has done a really great job at this, they will probably also want to tell you about it.
The blueprint for transients
When we listen to music, we want the transients to be reproduced as precisely as possible. There are other factors that affects the way transients are reproduced, but the sum of factors typically contributing to high inductance are collectively also probably the worst at distorting how transients are reproduced. Keep inductance under control to avoid broken transients.